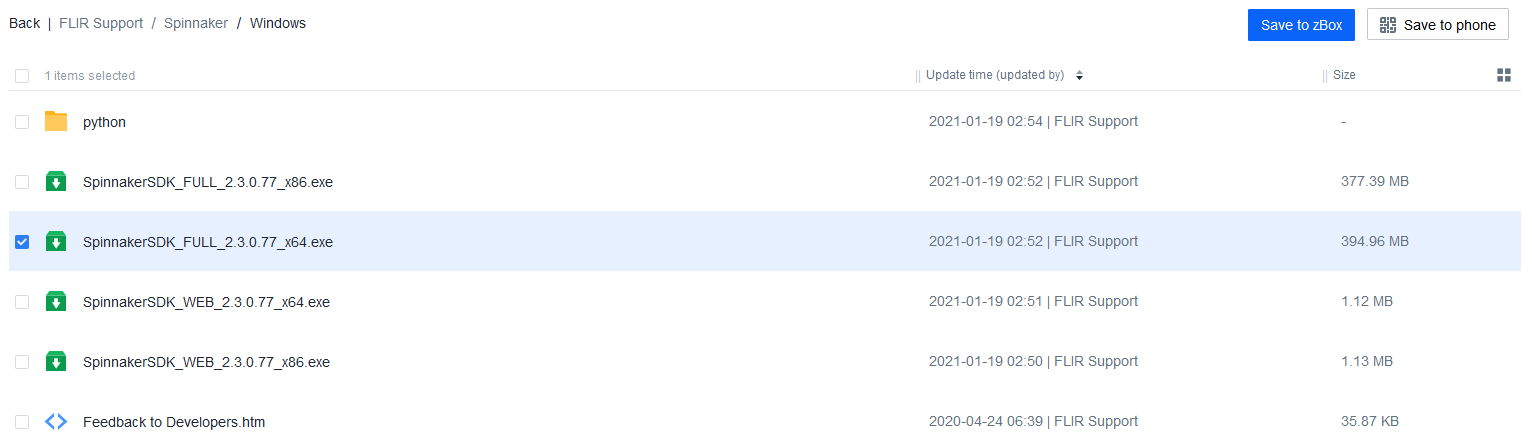
저장소에 보면 위와 같이 Windows 환경에서 SpinnakerSDK의 Full 버전을 다운받을 수 있도록 제공해주고 있다.
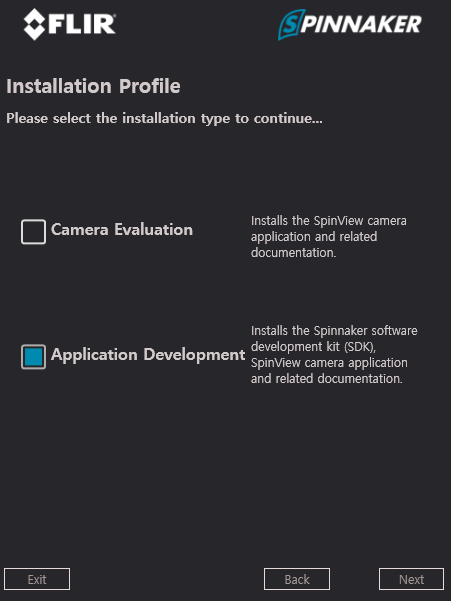
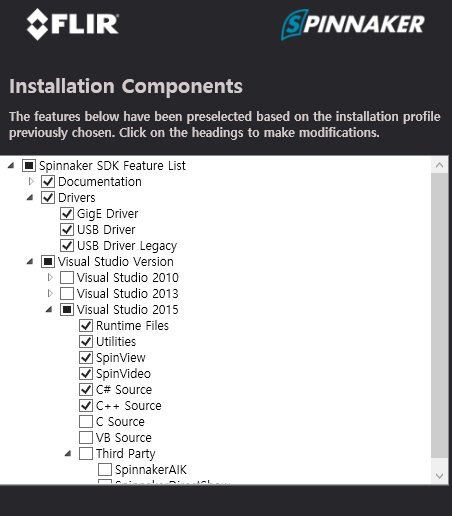
그리고 설치를 진행하는 중 위와 같은 과정을 진행하게 되는데 위의 "Camera Evaluation"의 경우 카메라의 정상작동 여부만을 확인할 수 있도록 Viewer 와 이와 관련된 간단한 프로그램들만 설치되는 과정으로 보이고 코드작업을 통해 디테일한 작업을 진행하고자 한다면 아래의 "Application Development"를 선택해야 하는 것으로 보인다.
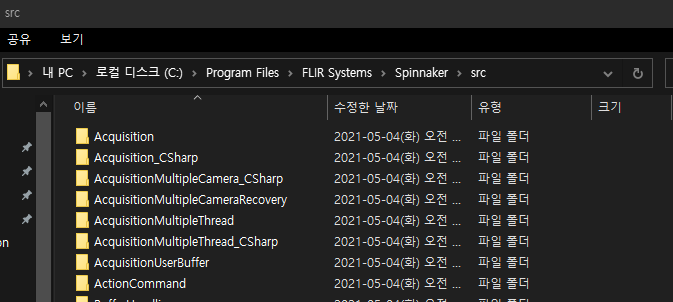
그리고 설치가 완료되면
"C:/Program Files/ FLIR Systems/ Spinnaker/ src/ " 의 경로에서 샘플 코드들을 확인할 수 있다.
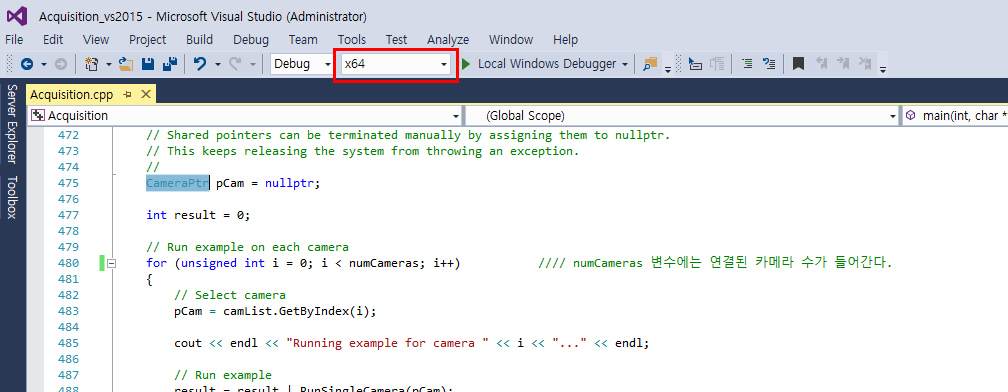
나는 현재 Visual 2019 버전을 사용중인데 해당 버전은 아직 지원되지 않는 것 같다.
그래서 MS 홈페이지에서 VisualStudio2015를 설치를 진행하려 했으나
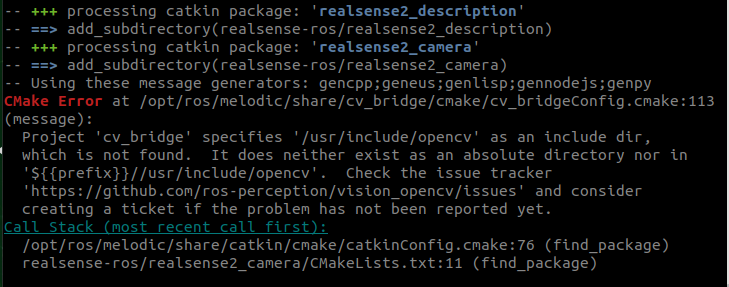
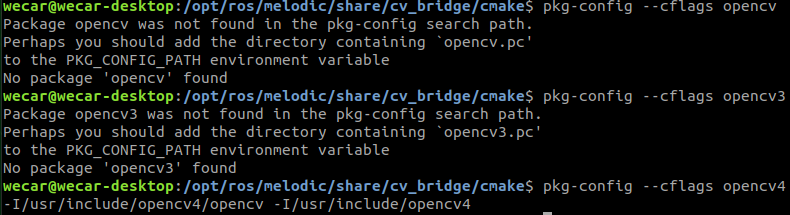
위와 같은 창에서 패키지가 없거나 찾을 수 없다는 내용만 뜨면서 진행이 되지 않는 문제가 발생하였다.
결국 iso 형식의 visual2015를 구해 진행하니 설치가 잘 되었다.
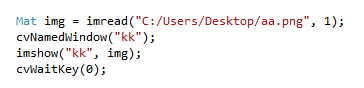
그리고 앞에서 받은 Sample Code들을 돌려봐도 잘 실행되는 것을 확인할 수 있었다.
# CMake
$ sudo apt-get install cmake
# google-glog + gflags
$ sudo apt-get install libgoogle-glog-dev
# BLAS & LAPACK
$ sudo apt-get install libatlas-base-dev
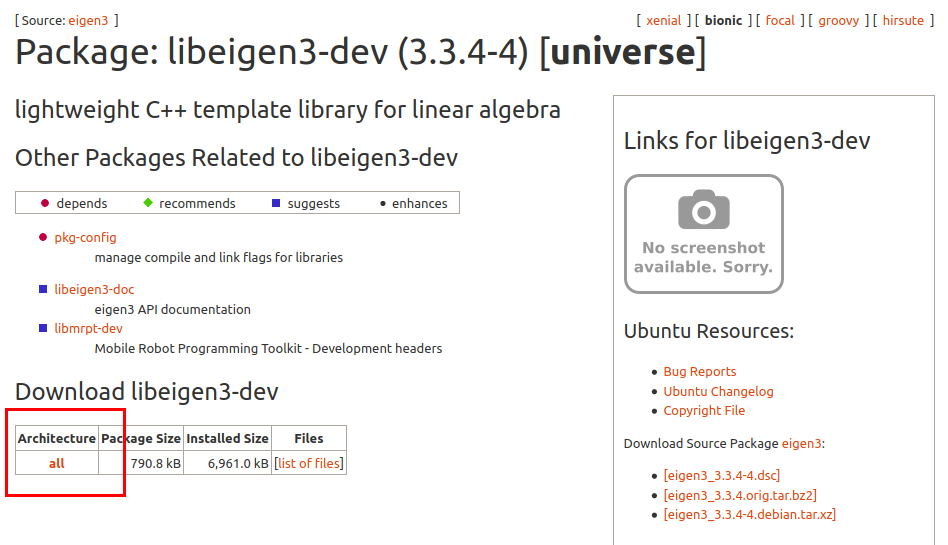
# Eigen3
$ sudo apt-get install libeigen3-dev
# SuiteSparse and CXSparse (optional)
# - If you want to build Ceres as a *static* library (the default)
# you can use the SuiteSparse package in the main Ubuntu package
# repository:
$ sudo apt-get install libsuitesparse-dev
# - However, if you want to build Ceres as a *shared* library, you must
# add the following PPA:
$ sudo add-apt-repository ppa:bzindovic/suitesparse-bugfix-1319687
$ sudo apt-get update
$ sudo apt-get install libsuitesparse-dev
아래 코드는 workspace에서 진행해준다.
즉, ceres-solver 폴더와는 별개로 ceres-bin을 생성한 후 아래 과정을 진행한다.
$ mkdir ceres-bin
$ cd ceres-bin
$ cmake ../ceres-solver
$ make -j3
$ make test
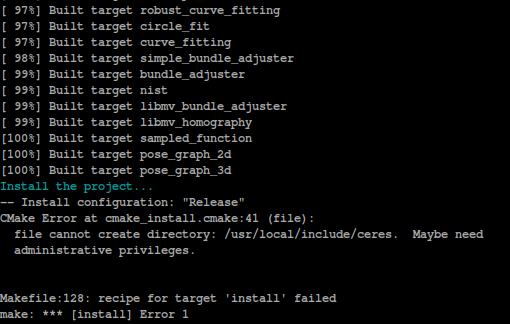
$ make install
우분투 16.04 버전에서 ceres-solver을 빌드하게 되면 eigen3의 버전문제로 문제가 발생하게 된다.
eigen3의 버전은 3.3이상이 요구되지만 16.04에서 설치된 것은 3.2.92이다($ pkg-config --modversion eigen3)