가장 먼저 Intel realsense sdk를 설치한다.
Intel RealSense SDK 2.0 – Intel RealSense Depth and Tracking cameras
Free Cross-platform SDK for depth cameras (lidar, stereo, coded light). Windows, Linux and other. 10+ wrappers including ROS, Python, C/C++, C#, unity. Try!
www.intelrealsense.com
$ export ROS_VER=melodic
$ sudo apt-get install ros-melodic-realsense2-camera
workspace를 만들기 위해 catkin_ws_d435i 라는 이름의 디렉터리를 생성한다.
$ mkdir -p ~/catkin_ws_d435i/src
$ cd ~/catkin_ws_d435i/src/
Intel RealSense 패키지를 다운받자.
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..그리고 아래 과정을 통해 catkin_make를 설치하자.
catkin_init_workspace
cd .. (catkin_ws_d435i 폴더로 이동)
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
setup.bash 파일을 source한다.
echo "source ~/catkin_ws_d435i/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
* 카메라 노드 실행
$ roslaunch realsense2_camera rs_camera.launch관계를 살펴보기 위해 rqt_graph를 실행해보자.

* 포인트클라우드 생성
우선 위에서 실행한 roslaunch realsense2_camera 를 종료하고 아래 명령어를 실행한다.
$ roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
상단의 Fixed Frame을 camera_color_frame으로 변경해야 좌표계를 맞게 설정하게 된다.
*imu 사용하기
rostopic list 를 실행하여 확인해보면 imu에 대한 topic이 확인되지 않는다.
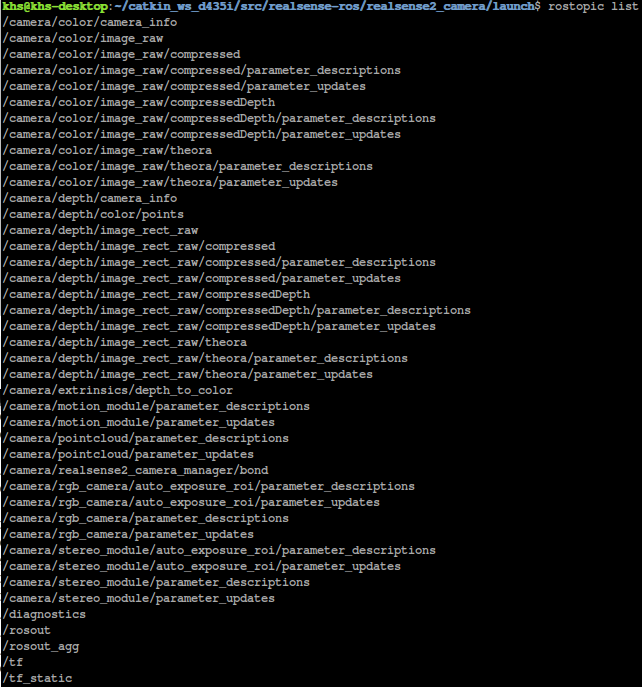
$ roslaunch realsense2_camera rs_camera.launch filters:=pointcloud unite_imu_method:="linear_interpolation" enable_gyro:=true enable_accel:=true위에서 실행시켰던 roslaunch 명령어에 몇가지 arguments를 추가해주자.
해당 arguments 는 rs_camera.launch 파일에 작성되어있는 부분을 수정해 준 것이다.
그럼 다음으로 imu값을 받아오기 위해 imu tools 패키지를 설치해주자.
$ sudo apt-get install ros-melodic-imu-tools
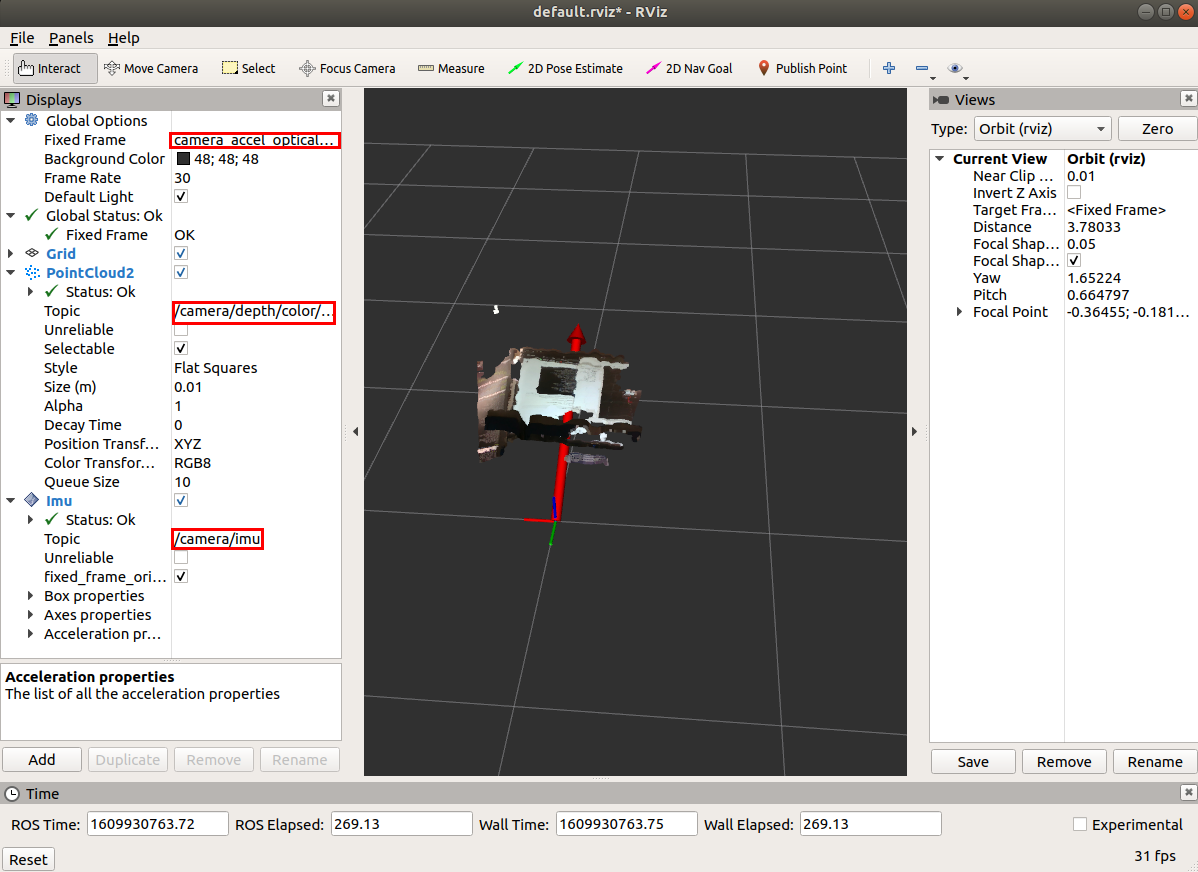
그럼 이제 rviz를 실행시켜 시각화해보자.
이때 "Global Option" 의 "Fixed Frame" 은 camera_accel_optical.. 로 설정하고
IMU 항목과 PointCloud2 항목에서 Topic을 설정해준다.
imu 센서의 값들을 확인해보고자 한다면 아래 명령어를 실행시키자.
$ rostopic echo /camera/imu'ROS' 카테고리의 다른 글
| VINS-MONO (0) | 2021.03.09 |
|---|---|
| Realsense D435i Rtabmap (0) | 2021.03.09 |
| RPLIDAR A3 실행(Hector SLAM In ROS) (0) | 2021.02.02 |
| ROS에서 Realsense D435i 실행시키기 (0) | 2020.12.28 |
| ROS IP주소를 이용한 다른pc의 캠(CAM) 사용 (0) | 2019.09.16 |