반응형
Intel의 Realsense D435i 카메라를 ROS에서 실행시키는 과정이다.
카메라를 PC에 연결시킨다.
이 때, USB3.0 포트를 사용하여 연결을 진행한다.
가장 먼저 카메라가 잘 작동하는지 확인해보기 위해 Realsense-Viewer 프로그램을 통해 실행상태를 확인해본다.
* Realsense Driver 설치
# server's public key 등록
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
# 서버추가(Ubuntu 18.04)
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u
# 라이브러리 설치
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
# Debug Package, Developer 설치(선택사항)
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
# ROS Package 설치
sudo apt-get install ros-$$ROS_VER-realsense2-camera
# realsense-viewer 실행
realsense-viewer
여기까지 진행하면 아래와같은 화면이 출력되고 카메라가 제대로 연결되었음을 확인할 수 있다.

그럼 이제 realsense-viewer을 종료하고 다음 코드를 실행한다.
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
실행 결과 현재
control_transfer returned error, index: 768, error: Resource temporarily unavailable, number: 61
위의 문구가 출력되고 있다.
문제가 발생한 것 같은데 자세한 원인은 더 찾아봐야 한다.
여기까지 진행되었으면 rviz 를 입력하여 실행시킨다.

PointCloud2 를 Add 시켜준 후 Topic에 경로를 지정해준다.
그래도 아직 상단부분에 Global Status 부분에 에러가 발생한 것을 확인할 수 있다.

그럼 위와 같은 방식으로 Axes 를 추가해준다.
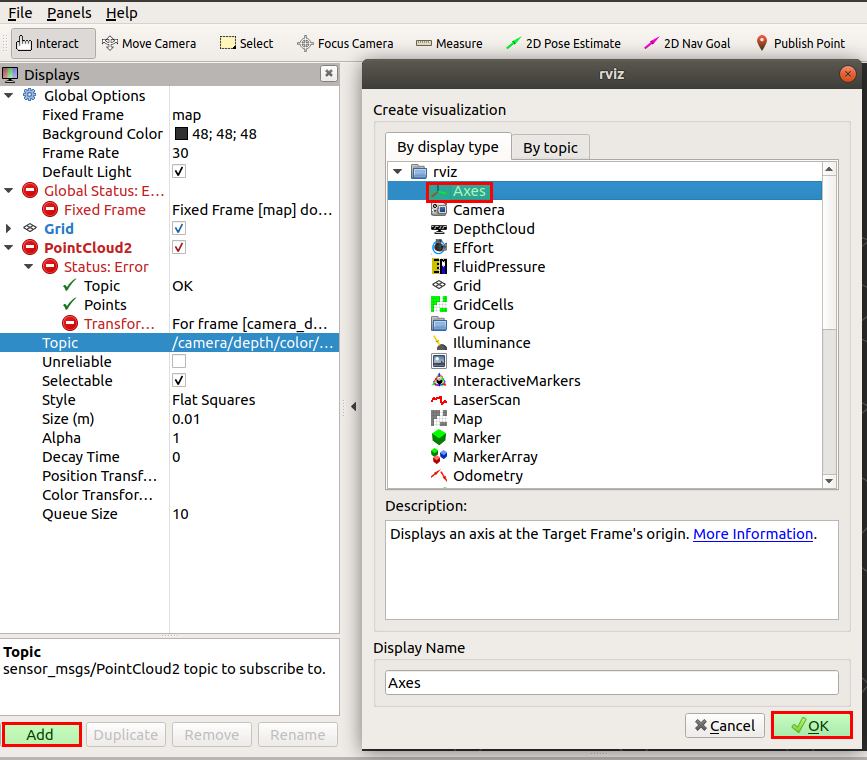
마지막으로 Global Options 에서 Fixed Frame을 Map 이 아닌 camera_color_frame으로 변경하면
3차원 거리정보의 Point Cloud가 보이게 된다.

반응형
'ROS' 카테고리의 다른 글
| VINS-MONO (0) | 2021.03.09 |
|---|---|
| Realsense D435i Rtabmap (0) | 2021.03.09 |
| RPLIDAR A3 실행(Hector SLAM In ROS) (0) | 2021.02.02 |
| Ubuntu에서 ROS를 통해 Intel Realsense D435i 사용하기 (1) | 2021.01.06 |
| ROS IP주소를 이용한 다른pc의 캠(CAM) 사용 (0) | 2019.09.16 |