반응형
$ roscore
위의 코드를 입력하여 roscore 실행
$ rosrun turtlesim turtlesim_node
그리고 다른 창을 열어(ctrl+t)
$ rosrun turtlesim turtle_teleop_key
그리고 연결상태를 확인하기 위하여
$rqt
를 진행하여 주고 위의 [플러그인] 메뉴에서 [ROS Graph] 를 선택하여 준다.
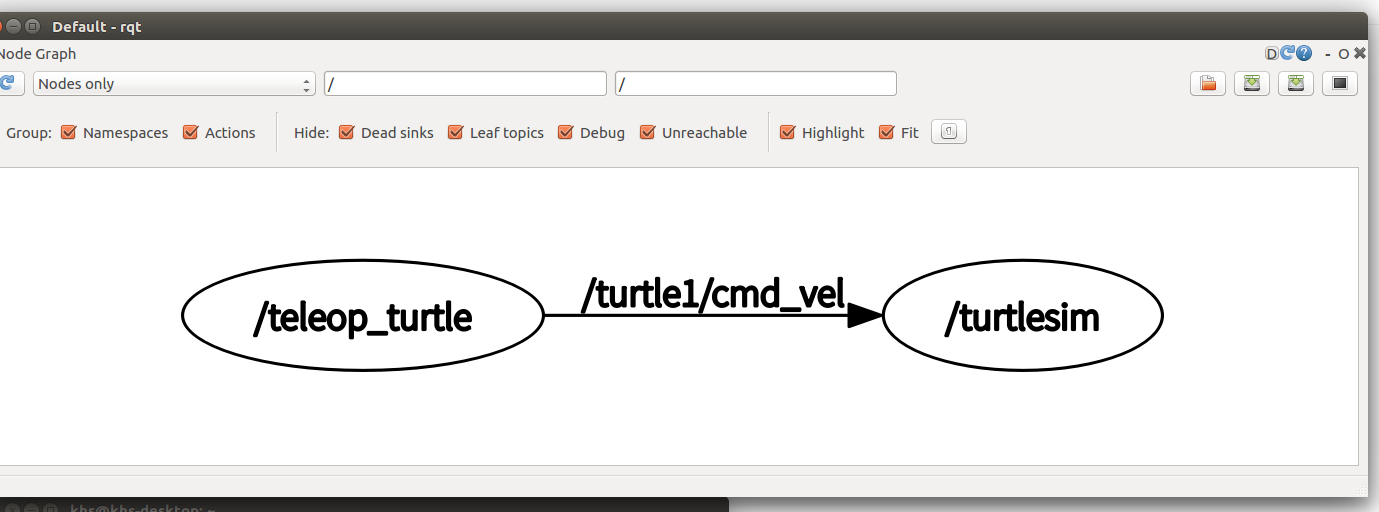
그럼 아래와 같이 나오는 것을 확인할 수 있다.
반응형
'ROS > ROS 기초' 카테고리의 다른 글
| roslaunch + tab 혹은 roscd roslaunch 등이 안될 때 (0) | 2021.03.12 |
|---|---|
| Ubuntu 18.04 ROS 설치하기(ROS Melodic) (1) | 2020.12.22 |
| ROS로 카메라 사용하기(영상 확인) (0) | 2019.09.16 |
| ROS 용어 정리 (0) | 2019.09.16 |