반응형
우선 카메라를 작동시킬 pc에서 roscore을 실행시켜 주도록 한다.
$ roscore
그리고 카메라를 사용하기 위해 아래의 코드를 입력한다.
$ rosrun uvc_camera uvc_camera_node
$ rqt_image_view
그 상태에서
$ gedit ~/.bashrc
를 입력해주고
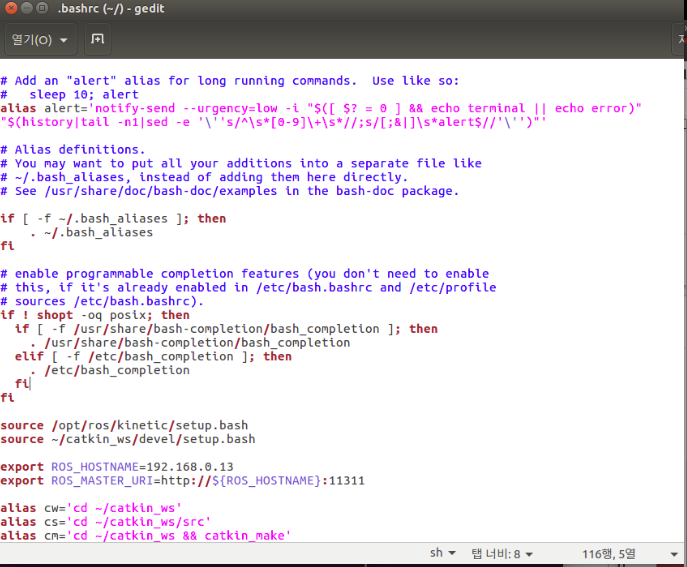
아래에서 4번째 줄에 위치한
export ROS_MASTER_URI=http://*****:11311
부분에 카메라를 띄울 pc의 ip를 적어준다.
그리고 export ROS_HOSTNAME=192.168.0.13 이 부분에는 자신의 ip 주소를 넣어준다.
그러면 MASTER_URI에 입력된 IP의 pc 웹캠을 자신의 pc에서 확인할 수 있다.
반응형
'ROS' 카테고리의 다른 글
| VINS-MONO (0) | 2021.03.09 |
|---|---|
| Realsense D435i Rtabmap (0) | 2021.03.09 |
| RPLIDAR A3 실행(Hector SLAM In ROS) (0) | 2021.02.02 |
| Ubuntu에서 ROS를 통해 Intel Realsense D435i 사용하기 (1) | 2021.01.06 |
| ROS에서 Realsense D435i 실행시키기 (0) | 2020.12.28 |