1. Setup
$ roscore
$ rosrun turtlesim turtlesim_node
$ rosrun turtlesim turtle_teleop_key
2. ROS Topics
위의 setup과정에서 실행한 turtlesim_node와 turtle_teleop_key 노드들은 ROS Topic을 통해 서로 통신하게 된다.
tuetle_teleop_key는 키보드의 입력을 publishing하게 되고 tuetlesim_node 노드는 같은 Topic을 subscribe하여 키의 입력을 전달받데 된다. 구조는 rqt_graph를 이용하여 쉽게 시각화시킬 수 있다.
2.1 Using rqt_graph
rqt_graph는 ROS 시스템의 구성을 그래프로 보여주는 도구로 rqt package의 한 부분이다.
아래 명령어를 통해 작업을 진행한다.

그럼 아래 명령어를 통해 Setup과정에서 진행한 ROS시스템의 구성을 살펴보자.

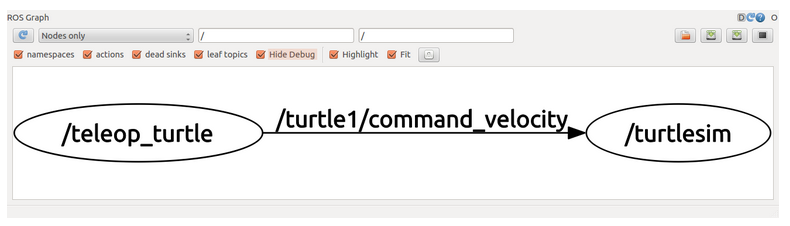
위의 그래프를 통해 /turtle1/command_velocity 라는 이름의 Topic에 대해 /teleop_turtle 노드와 tutlesim 노드가 메시지(데이터)를 통신하는 관계임을 확인할 수 있다.
2.2 Introducing rostopic
rostopic 툴은 ROS Topics에 대한 정보를 얻기 위한 도구이다.
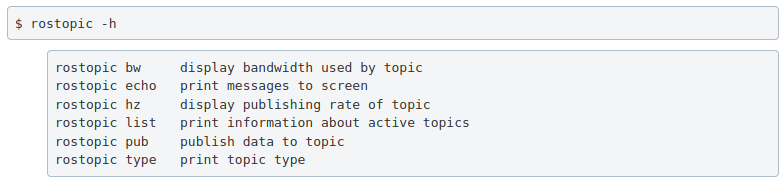
2.3 Using rostopic echo
rostopic echo는 토픽에 대해 publish된 내용들을 표시해준다.

위와 같은 구조로 사용하게 되고 이를 예제 적용하여 보면

위의 명령어를 입력한 후 teleop_key 터미널창에 방향키 입력을 통해 거북이를 움직여보면 값이 변화하는 것을 확인할 수 있다.
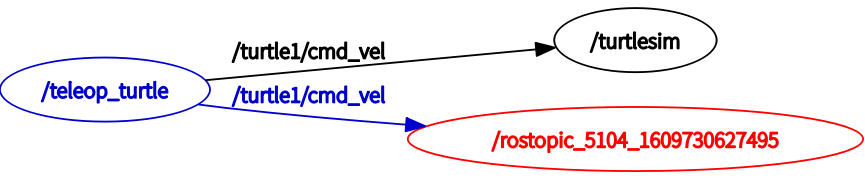
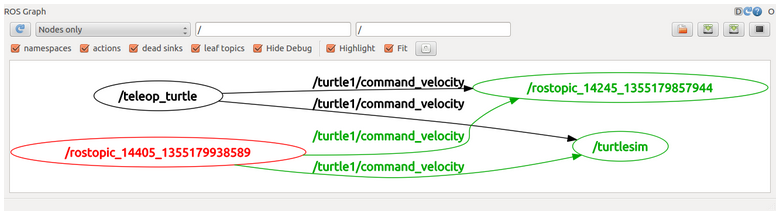
이제 rqt_graph를 확인하여 보면 아래와 같이 붉은색으로 rostopic echo 노드가 생성되어 turtle1/command_velocity 토픽을
subscribe 하는것을 확인할 수 있다.
즉, turtle1/cmd_vel topic에 대해 teleop_turtle노드는 입력받는 키에 대한 정보를 publish하고 이를 나타내는 turtlesim 노드와 회전각 및 이동량을 전달받는 rostopic echo 노드가 topic을 subscribe하는 것을 확인할 수 있다.
2.4 Using rostopic list
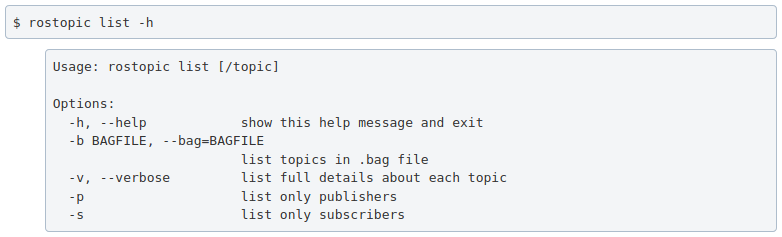
rostopic list는 현재 topic에 대해 subscribe 및 publish 되는 노드들의 정보를 나타낸다.
rostopic list에 대한 argument들은 다음 명령어를 통해 확인할 수 있다.
3. ROS Messages
Topic들에 대한 통신(Communication)은 노드들 사이에 ROS 메시지를 전송함으로서 진행된다.
publisher(turtle_teleop_key)와 subscriber(turtlesim_node)가 통신하기 위해서는 각각 동일한 타입의 메시지를 송수신 하여야 한다.
즉, topic의 타입은 publish되는 메시지의 타입에 따라 정의되게 되고 이러한 토픽에 전송되는 메시지는 rostopic 타입을 통해 결정된다.
3.1 Using rostopic type
rostopic type는 publish되는 메시지 타입들을 보여준다.

우리의 예를 들면

위의 명령어를 통해 turtle1/cmd_vel 이라는 Topic의 메시지 타입을 확인하면 아래와 같은 결과를 확인할 수 있다.

그리고 메시지의 자세한 정보를 위해 rosmsg를 아래와 같이 사용하면 결과를 확인할 수 있다.
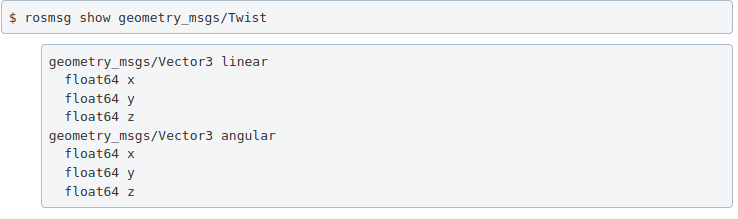
즉, geometry_msgs/Twist 라는 데이터 형은 직선방향, 각도에 대한 데이터형이고 이는 float64형임을 확인할 수 있다.
4. rostopic continued
4.1 Using rostopic pub
rostopic pub은 현재 토픽에서의 데이터를 publish한다.


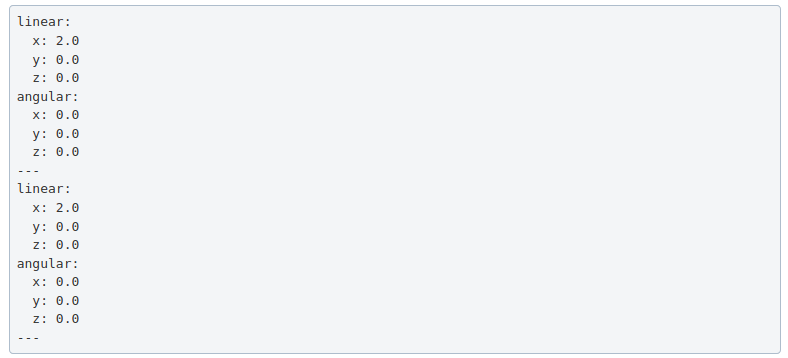
위의 명령은 turtlesim 노드에게 직선속도 2.0과 각속도 1.8을 갖고 움직여라 라는 의미를 담고있다.

그럼 위와 같은 결과를 볼 수 있다.
굉장히 복잡한 명령어이므로 자세히 살펴보자.
우선 가장 앞에 등장하는 rostopic pub은 해당 topic에게 메시지를 전송하겠다는 것을 의미한다.
* -1(dash-one) 은 한번의 메시지만 publish한 후 종료하라는 의미를 담고있다.
* turtle1/cmd_vel 은 publish할 토픽의 이름을 나타낸다.
* geometry_msgs/Twist 는 topic을 publish할 때, 메시지의 타입을 나타낸다.
* --(double dash)는 해당 argument에 값을 넣어주지 않기 위한 과정이다.
* 앞에서와 같이 geometry/Twist 메시지는 각각 3개의 floating 요소들로 구성된다.
그리고 거북이를 계속 움직이기 위해선 아래 명령어와 같이 rostopic pub -r 명령어를 사용하자.

이 과정을 rqt를 이용해서 확인하여보면 아래와 같다.
보면 subscribe 노드는 rostopic echo 노드와 turtlesim 노드, publish는 teleop_turtle노드와 추가적으로
새로운 노드가 생성된 것을 확인할 수 있다.
즉 teleop_turtle로 키 입력을 받는 것 외에 계속적으로 움직임을 가질 수 있도록 새로운 노드가 생성되어 publish하는 것을
확인할 수 있다.
4.2 Using rostopic hz
rostopic hz는 어떤 데이터들이 publish 되는지 확인할 수 있다.


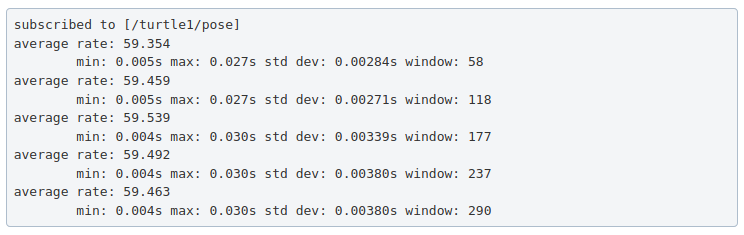
보면 average rate가 60과 가까운 것을 확인할 수 있고 이는 turtlesim 노드가 pose에 대한 데이터는 60Hz로 Publish 한다는
것을 의미한다.
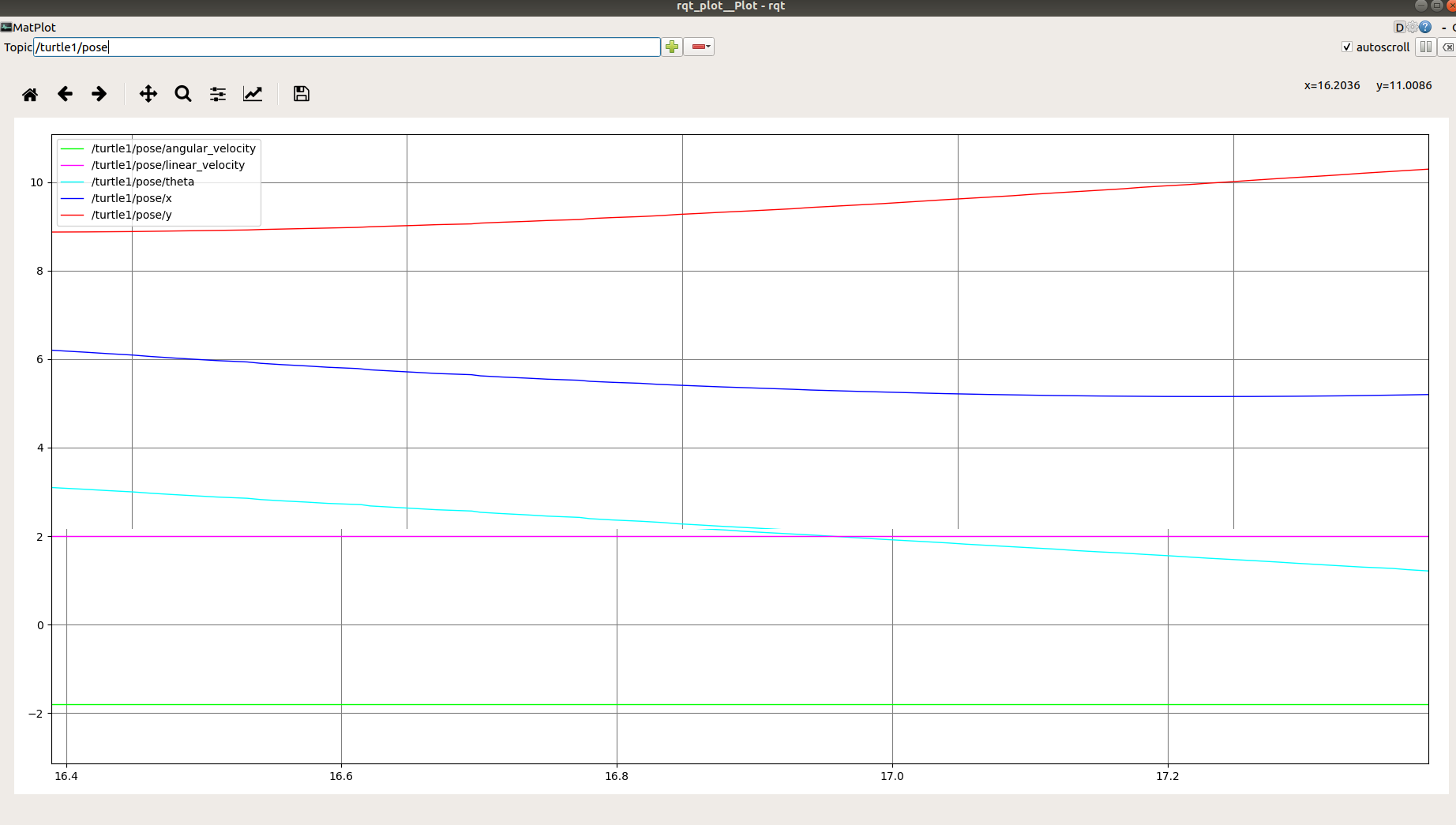
5. Using rqt_plot
rqt_plot은 topics에 대해 publish되는 데이터의 연속적인 값들을 보여준다.

위의 명령어를 통해 rqt_plot을 진행하고 상단의 Topic에 그래프로 나타내고자 하는 토픽을 지정하고 옆의 + 버튼을 누르자.
근데 우분투 18.04버전을 진행함에 있어 다음과 같은 에러가 발생한다.
창의 크기를 조절하게 되면 다음과 같은 결과를 출력하며 강제 종료되게 된다.
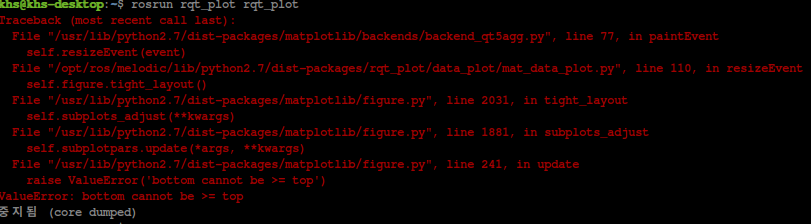
이는 matplotlib 내부에 존재하는 문제로 아직 해결책을 찾지는 못하였지만 대체 방안으로 창을 최대화하면 보이는 것을 확인할 수 있다.
아래 링크는 해당 문제가 발생한 것에 대한 참고 링크이다.
github.com/ros-visualization/rqt_plot/issues/35
Error when re-arranging widgets over plot. Kinetic, 16.04 · Issue #35 · ros-visualization/rqt_plot
When I try to re-arrange widgets in rqt, whenever I pass with it over a plot widget, I get the error: Traceback (most recent call last): File "/opt/ros/kinetic/lib/python2.7/dist-packages/qt_g...
github.com
'ROS > ROS Wiki' 카테고리의 다른 글
| Using rqt_console and roslaunch (0) | 2021.01.05 |
|---|---|
| Understanding ROS Services and Parameters (0) | 2021.01.05 |
| Understanding ROS Nodes (0) | 2021.01.03 |
| Building a ROS Package (0) | 2020.12.31 |
| Creating a ROS Package (0) | 2020.12.31 |